AGENT REPRESENTATION
In the system, we represent human cognitive processes as the “perception-action” behaviors of autonomous agents. That is, autonomous agents interact with a virtual environment and with each other following the simulated sensing, decision-making, and reacting/acting processes.
An autonomous agent represents a human individual, and it bears a set of physical as well as cognitive properties of a human individual. These properties include:
Population type. Human individuals are different from each other by age, body dimension, mobility and personality. The system currently includes five general human categorizations, similar to Simulex – Median, Adult Male, Adult Female, Child and Elderly. Each categorization represents a typical type of human population.
 |
|
| Sensing objects | Sensing an exit sign |
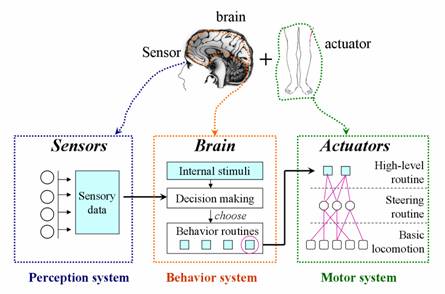
Sensors. Each agent is equipped with a visual sensor so that it can analyze the environment. The visual sensor is developed using the ray tracing method . By casting laser rays from the eye position of an agent within a visual angle (e.g., 170o), an agent can compute the intersection of a ray and the near object, which allows it to determine (1) the geometrical distance from the sensor to the intersecting object, and (2) the type of the object that the ray intersects. An agent can also sense an object through ‘body contact’, that is, whenever a physical collision is detected, the agent recognizes the location and the type of object it collides with. The information received from the sensors is utilized by an agent to make decisions.
Decision rules. Agent’s actions are driven by decision rules. When a situation is perceived, an agent activates a decision rule to produce an action. The choice of a decision rule is determined by the situational cues and the agent’s psychological factors (i.e., perceived importance, uncertainty and urgency) at that moment. For example, if an agent detects two exits and its uncertainty level is ‘high’, then the agent pursues the exit that has the most crowds (i.e., herding).
Actuators. Actuators of an agent refer to its faculties of being able to walk, run, stop, side-shift and turn. These faculties are the basic locomotion capacity of an agent to maneuver in a virtual environment.
The properties described form the basis of an agent’s behaviors in the prototype system, the system that is able to simulate not only simple behaviors (e.g., finding an exit) but also complex social behaviors (e.g., queuing and herding behaviors).
If you have any comments or suggestions, please send them to xpan@stanfordalumni.org || Back to main page